










MODELO VERSIÓN 2.0
El siguiente reporte, elaborado por el Mtro. Camilo Caudillo Cos, representa una actualización del modelo anteriormente presentado. Las mejoras que se observan a continuación vienen derivadas de la inclusión de datos de velocidad y flujo vehicular en torno de los cruceros evaluados, generosamente facilitados por la empresa SIN TRÁFICO.
La empresa Sin Tráfico distribuye una plataforma de monitoreo de los flujos vehiculares en México. Se les solicitó la información correspondiente a los segmentos de calle adyacentes a los cruceros del estudio del Índice de Seguridad en Cruces Peatonales (ISCP) que pudiera ayudar a caracterizar la velocidad y cantidad de los autos durante el periodo pico de la mañana. La empresa integró una base de datos con la información de velocidades y flujos mínimos, el primer cuartil, la media, la mediana el cuarto cuartil y el máximo para cada uno de los cerca de 500 cruces evaluados.
Al introducir las nuevas variables al modelo, estamos intentando incorporar factores que pueden configurar la noción de riesgo desde el peatón y también de peligro por parte de los automovilistas, elementos que no forman parte del ISCP dado que éste se centra en las características materiales de los cruces.
El reglamento de tránsito establece un máximo de 50 km/h en la mayoría de las vialidades primarias. En este sentido, es importante resaltar que en algunos de los cruceros la velocidad promedio claramente excede el límite. La implicación directa del exceso de velocidad tiene dos facetas: por un lado, los conductores no respetan en marco legal; por otro, las autoridades no tienen la capacidad para hacer cumplir las leyes. Evidencia de ello, es que en varios cruceros las velocidades máximas alcanzan los 70 km/h, lo que aumenta la probabilidad de que el resultado de un evento culmine en defunciones.
A continuación se muestran los valores de los flujos y velocidades promedio en los cruces del estudio:
Figura 1. Flujos y velocidades promedio en cruceros de estudio
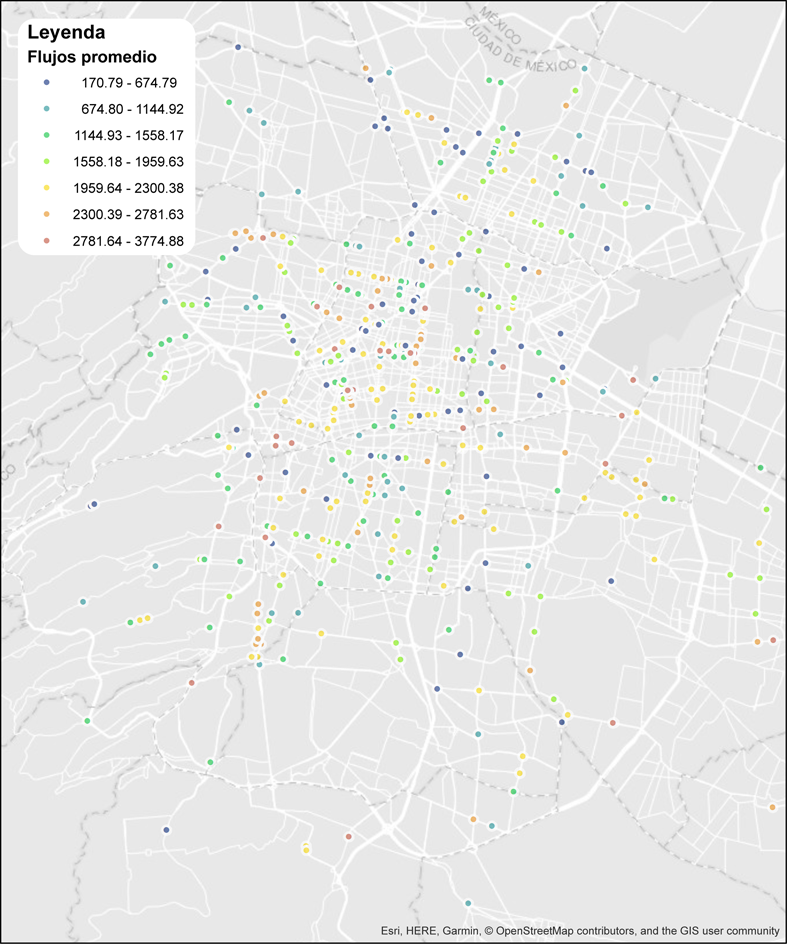
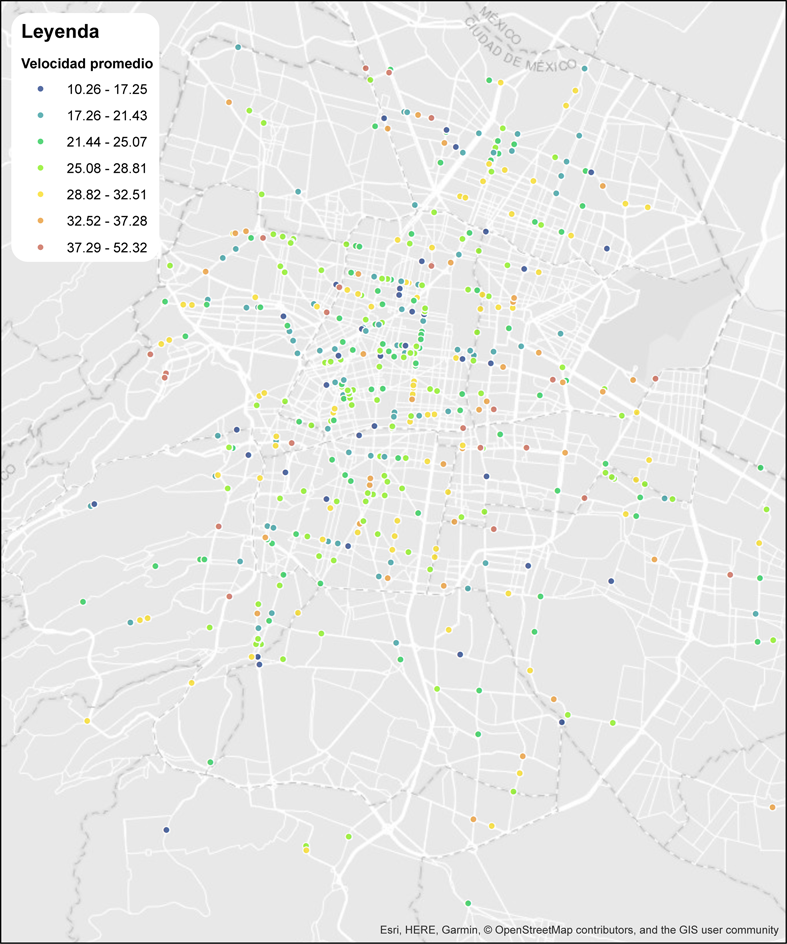
Fuente: Elaboración propia con datos de Sin Tráfico.
Todos los cruceros del estudio están sobre vialidades primarias. Las velocidades promedio tienen un rango relativamente limitado, mientras los flujos exhiben una variación mayor.
Los datos de velocidad y flujos vehiculares se correlacionan con diferentes intensidades, mostrando en algunos casos valores suficientemente altos como para introducir multicolinealidad a los modelos. El siguiente gráfico muestra esta relación:
Figura 2. Alta correlación entre datos de velocidad y flujo vehicular
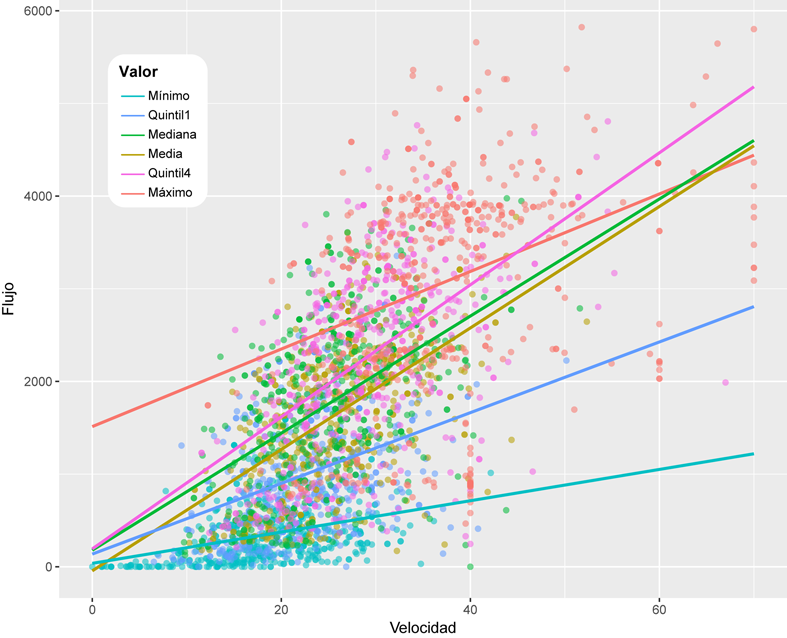
Fuente: Elaboración propia con datos de Sin Tráfico.
El aumento de la pendiente nos indica que al tomar valores más altos de la distribución de cada variable, encontraremos una relación más fuerte entre ellas, por lo menos del mínimo al quintil 4, aunque la correlación nunca sea perfecta. Con la velocidad máxima parece haber una relación más curvilínea y con mayor dispersión.
Los gráficos de densidad nos confirman el comportamiento esperado de cada estadístico: la densidad se va trasladando hacia la derecha conforme nos acercamos a valores más altos de la distribución.
Figura 3. Gráficos de densidad

Fuente: Elaboración propia con datos de Sin Tráfico.
Para mejorar la capacidad predictiva, probamos diferentes especificaciones del modelo con las variables de velocidad y flujos descritas previamente.
En muchos casos, mejoraban marginalmente el modelo previo, que incluye las variables del ISCP y la mezcla de usos de suelo.
La siguiente tabla muestra los resultados de las estimaciones. La Especificación 1 corresponde al modelo con las variables del ISCP y la mezcla de usos de suelo (índice de entropía), mientras que Especificación 2 y Especificación 3 son los modelos que incluyen los datos de velocidad y flujo de automóviles respectivamente.
Tabla 1. Reporte de modelaje incluyendo velocidad y flujo.
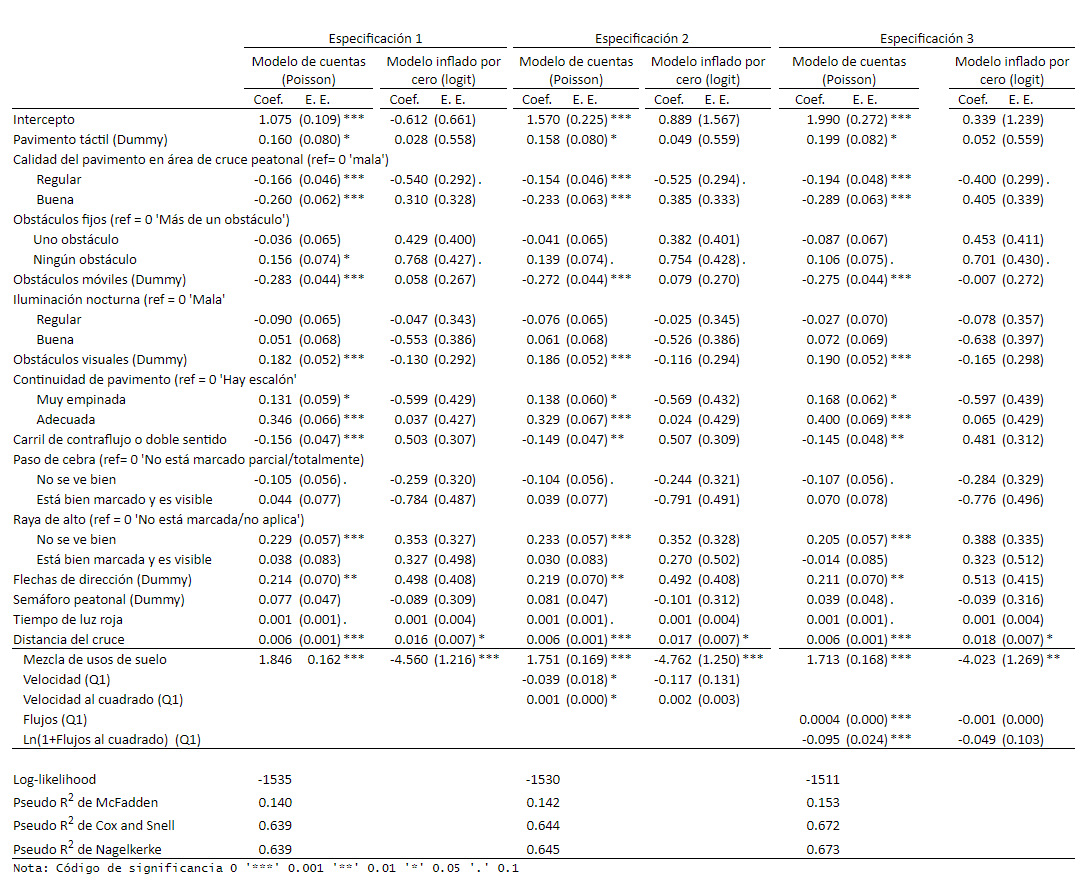
Fuente: Elaboración propia con datos de Sin Tráfico.
Análisis y Resultados
Un primer elemento a resaltar es que el coeficiente de la velocidad tiene un signo negativo, por ello incluimos un término cuadrático para probar una forma funcional distinta lo que arrojó los resultados esperados. El término cuadrático también es significativo, lo que implica que el primer quintil de la velocidad de los autos se relaciona negativamente con accidentes, pero llega un punto mínimo (alrededor de los 15 km/h) a partir del cual la relación se invierte. La última columna corresponde al modelo con los flujos, que tiene similar explicación que el modelo con las velocidades —como hemos visto estrechamente correlacionadas— pero hay una mayor ganancia en bondad de ajuste (pseudo R2 de Cox de 67%. En este caso, el coeficiente de los flujos es muy pequeño, por lo que la cuenta de accidentes disminuye rápidamente hasta que alcanza un mínimo (alrededor de los 500 automóviles) a partir del cual la cuenta aumenta, pero con una pendiente más suave.
El hecho de que tanto para el caso de las velocidades como con los flujos la variable significativa fuera el primer quintil resulta interesante (con una función cuadrática).
Una interpretación plausible de éste hecho es que, a velocidades bajas y pocos autos, es posible que la percepción de riesgo por parte del automovilista como del peatón sea baja, y es justamente cuando el modelo predice una disminución de los accidentes. Sin embargo, la forma de la función implica que a partir de un determinado punto la peligrosidad aumenta de forma estable, lo que posiblemente no es percibido ni por el peatón ni por el automovilista, y que a la postre provoca que los eventos aumentan de forma estable.
Una interpretación plausible de éste hecho es que, a velocidades bajas y pocos autos, es posible que la percepción de riesgo por parte del automovilista como del peatón sea baja, y es justamente cuando el modelo predice una disminución de los accidentes. Sin embargo, la forma de la función implica que a partir de un determinado punto la peligrosidad aumenta de forma estable, lo que posiblemente no es percibido ni por el peatón ni por el automovilista, y que a la postre provoca que los eventos aumentan de forma estable.
Como reflexión final de este modelaje, es importante no olvidar (como se señala en el reporte final) que para predecir de mejor manera los eventos de tránsito, parece ser que es indispensable no solo enfocarse en los eventos que culminan con fatalidades, sino en TODOS los eventos que eventualmente pudieran haber generado un conflicto automóvil-peatón. Es una tarea pendiente para la cual será necesario trabajar en un futuro con cámaras de video vigilancia para contabilizar la probabilidad de estos eventos.
Consulta aquí nuestro Reporte Final
Descarga